Priority queues with binary heaps
A binary heap is a tree data structure commonly used for
implementing priority queues, and
sorting (heapsort).
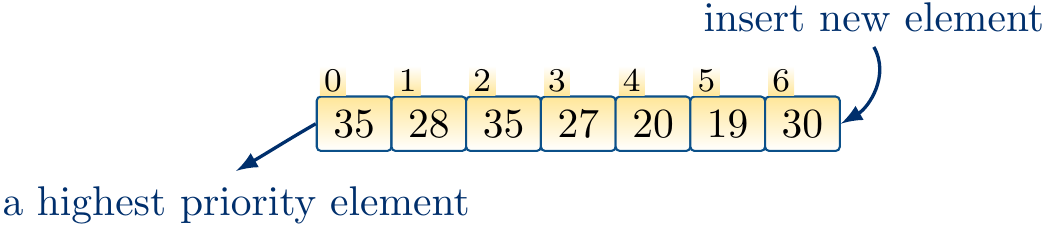
Abstractly, a priority queue is a container data structure in which the elements are ordered by some total priority ordering. Its core operations are
inserting a new element in the queue,
finding an element with the highest priority, and
removing an element with the highest priority.
In our examples, we use integers and the standard \(\le\) ordering. Note that multiple elements can have the same priority. Also observe that some implementations use the smallest priority instead of the largest.
An abstract data type for priority queues could have an API with:
insertfor inserting a new element.
maxfor getting an element with the highest priority.
remove-maxfor removing an element with the highest priority.
increase-priorityfor increasing the priority of an element.
decrease-priorityfor decreasing the priority of an element.
Priority queus can be used, e.g., for
prioritizing network traffic based on the type or previous usage,
ordering pending orders according to the customer type,
building an event simulator, where events must be simulated in an order of the associated start times, and
selecting the best next option in other algorithms (Dijkstra’s algorithm later in this course etc).
Note that the elements are inserted and removed from the queue in an online fashion all the time.
To implement priority queues, one could use resizable arrays and then apply a linear time search algorithm in each max and remove-max operation.
But we can in fact do much better, so that each insert and remove takes \(\Oh{\Lg{n}}\) time if we currently have \(n\) elements in the queue.
Binary heaps and the heap property
A binary max-heap is a binary tree with the following properties.
All levels are full, except possibly the last one that is filled from left to right up to some point.
The nodes are associated with elements ordered by a priority ordering \(\le\).
The max-heap property holds: the element of each node is at least as large as that of any of its children. That is, if \(x\) is the element of a node \(n\) and \(y\) is the element of child of \(n\), then \(y \le x\).
Binary min-heaps are defined similarly, except that the element of each node is at least as small as that of any of its children.
As a direct consequence, we have the following:
A binary heap with \(n\) nodes has height \(\Floor{\Lg n}\).
In a non-empty max-heap, an element with highest priority is in the root.
In a non-empty min-heap, an element with smallest priority is in the root.
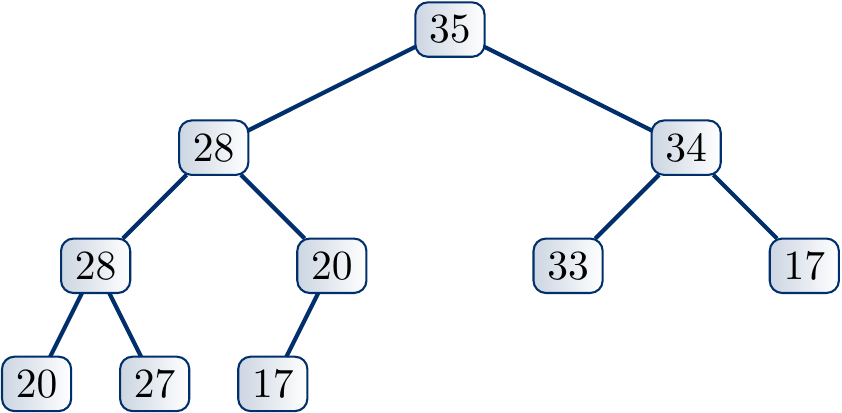
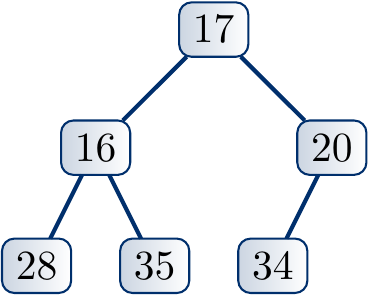
Example
Three nearly-complete binary trees, the elements associated with the nodes are shown inside the nodes.
The tree below is a max-heap.
The tree below is a min-heap.
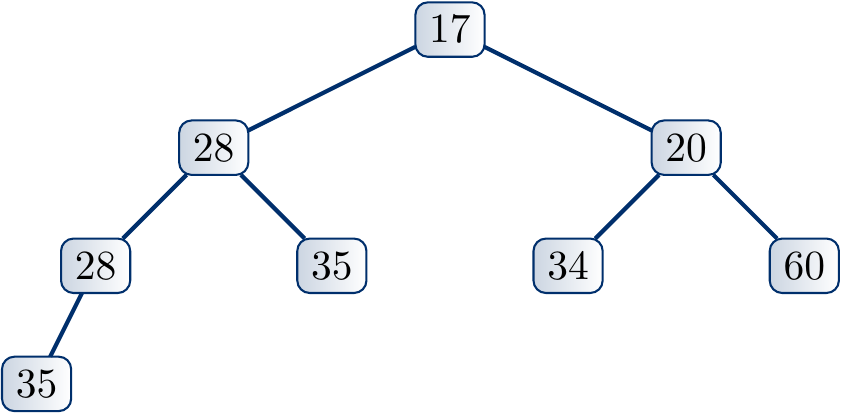
The tree below is neither a max-heap nor a min-heap.
Representing binary heaps
One does not usually represent binary heaps as node objects with pointers to children etc. Instead, as binary heaps are nearly-complete binary trees, they can be represented very compactly with (resizable) arrays. The idea is as follows:
A binary heap with \(n\) nodes is represented with a (resizable) array \(a\) of \(n\) elements.
The nodes are numbered from \(0\) to \(n-1\) level-wise, left to right.
The element of the node \(i\) is stored in \(a[i]\)
The left child of the \(i\):th node is the node \(2i+1\). If \(2i+1 \ge n\), then the \(i\):th node does not have a left child.
The right child of the \(i\):th node is the node \(2i+2\). If \(2i+2 \ge n\), then the \(i\):th node does not have a right child
The parent of a non-root node \(i\) is the node \(\Parent{i} = \lfloor\frac{i-1}{2}\rfloor\).
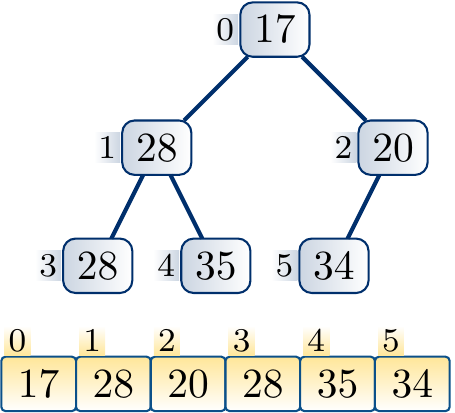
Example
The figure below shows a max-heap (i) as a tree with the node numbers shown besides the nodes, and (ii) as an array.
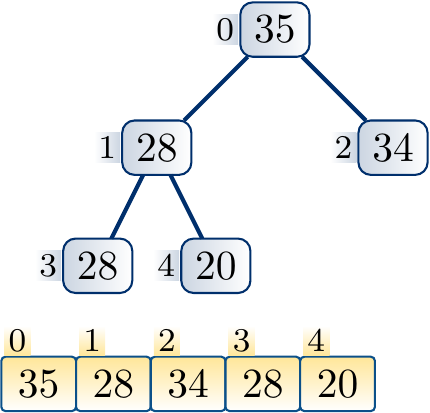
Similarly, the figure below shows the tree and array representations for a min-heap.
Binary heap operations
In the following, we will only consider max-heaps — min-heaps can be handled in a similar, dual way. In the binary heap operations, such as inserting an element, we
start with a valid max-heap,
make a small modification, such as inserting an element at the end of the array, and
if the max-heap property is violated after the previous step, restore the max-heap property by a series of transformations.
The upheap and increase-priority operations
The purpose of the upheap helper operation is to
fix the max-heap property
when we have increased the priority of some element in the binary heap.
The operation is also called swim and shift-up in some texts,
and Heap-Increase-Key in the Introduction to Algorithms (Aalto access) book.
The increase-priority operation then only increases the priority
of the element at a node,
and calls upheap on that node.
Suppose that we increase the priority of the element at a node \(i\). The max-heap property can now be violated if the element becomes larger than that of the parent node \(\Parent{i}\). If this is the case, we swap the elements in the nodes \(i\) and \(\Parent{i}\). The max-heap property now holds in the sub-tree rooted at \(i\) as the element of \(\Parent{i}\) was larger than that of \(i\) before the increase. But the max-heap property may now be violed if the priority at the node \(\Parent{i}\) is larger than that at its parent. If this is the case, we (recursively) repeat the process at the parent node until the max-heap property is preserved in the whole tree.
At each step, a constant amount of steps is taken. The process repeats at most \(\Lg n\) times as it must stop when the root node is reached.
Example
The following steps illustrate the process of increasing the priority of
the element at a node and
applying upheap to restore the max-heap property.
The max-heap in the beginning.
The tree after increasing the priority of the element of the node \(4\). The max-heap propery does not hold anymore.
upheapswaps the elements in the nodes \(1\) and \(4\).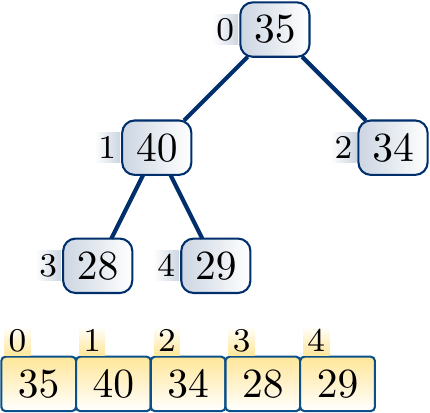
upheapswaps the elements in the nodes \(0\) and \(1\). The max-heap property holds again.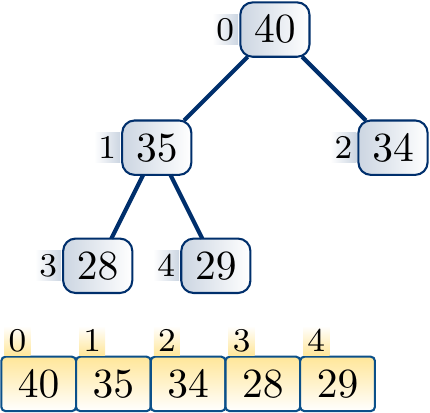
The downheap and decrease-priority operations
The purpose of the downheap helper operation is
to fix the max-heap property
after we have decreased the priority of some element in the binary heap.
It is also called sink and shift-down in some texts,
and Max-Heapify in the Introduction to Algorithms (Aalto access) book.
The decrease-priority operation then only decreases the priority of the element at a node,
and calls downheap on that node.
Suppose that we decrease the priority of the element at a node \(i\). The max-heap property becomes violated if the new priority is smaller than that at either of its children. In such a case, we swap the elements of \(i\) and the child \(j\) with the larger priority. After this, the priority at \(i\) is now at least as large as the priority of the other child. Furthermore, the priority at \(i\) is smaller or equal to that at \(\Parent{i}\) because the original priority at \(i\) was at least as large as that at \(j\). The max-heap property may now be violated if the new smaller priority at \(j\) is smaller than that of either of its children. If this is the case, we (recursively) repeat the process from the node \(j\) until the max-heap property is preserved.
At each step, a constant amount of steps is taken. The process repeats at most \(\Lg n\) times as it must stop when a leaf node is reached.
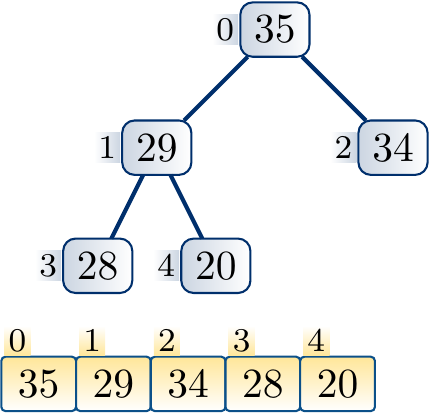
Example
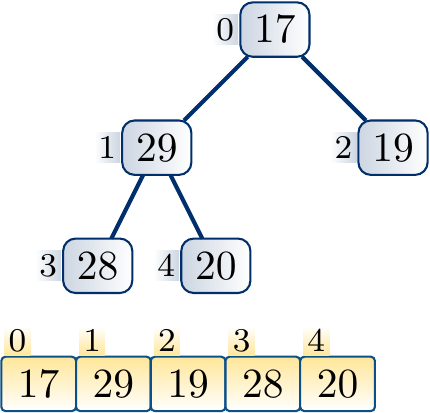
Decreasing the priority at a node and applying downheap to restore the max-heap property.
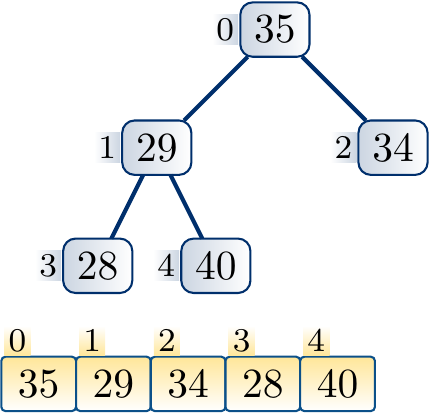
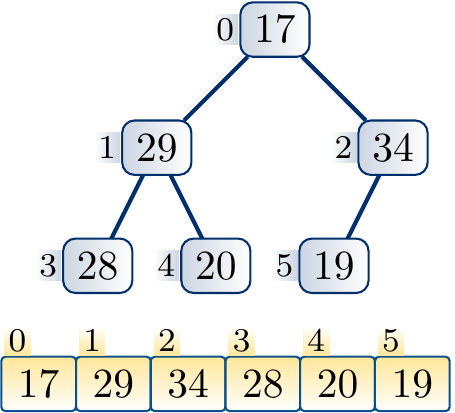
The max-heap in the beginning.
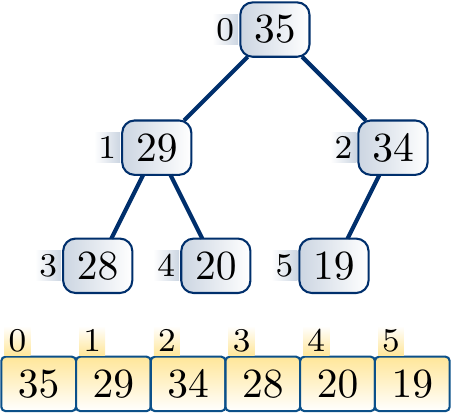
The tree after decreasing the priority at the node \(0\). The max-heap propery does not hold anymore.
downheapswaps the elements in the nodes \(0\) and \(2\).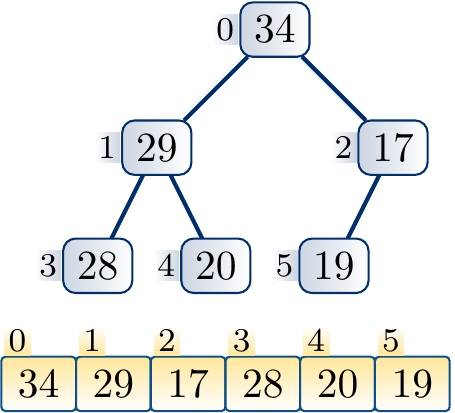
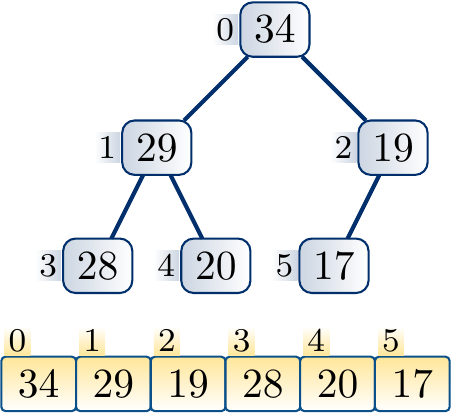
downheapswaps the elements in the nodes \(2\) and \(5\). The max-heap property holds again.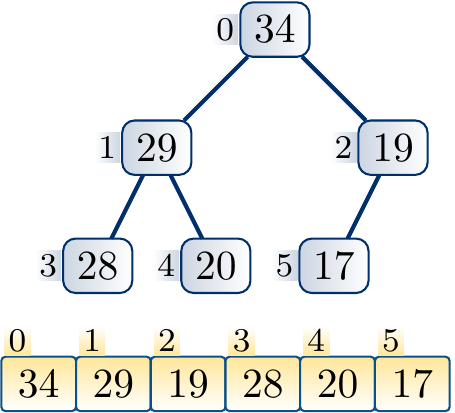
The insert operation
By using the upheap operation as a sub-routine,
inserting a new element in a max-heap is easy:
Increase the size of the array by one and add the new element in the new node at the end of the array.
Apply
upheapto the new node so that the max-heap property is restored.
Example: Applying the insert operation
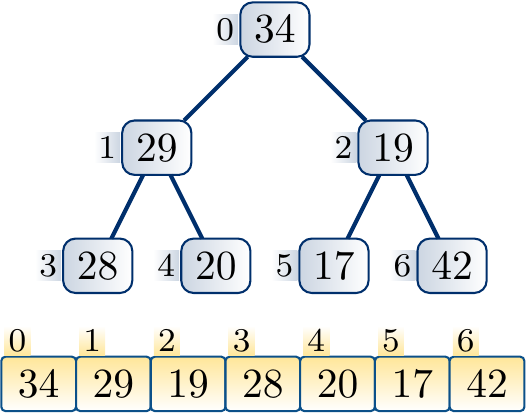
The max-heap in the beginning:
Insert an element with the priority \(42\) in the max-heap by adding it at the end of the resizable array. The max-heap property is now violated.
Apply
upheap.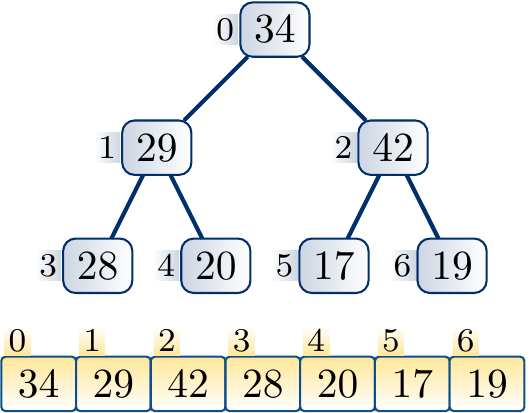
Apply
upheap. The max-heap property holds again.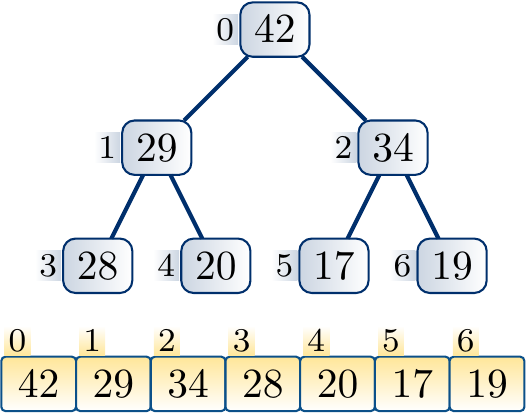
The max and remove-max operations
Implementing the max operation
(getting an element with the highest priority)
is easy in max-heaps as
the first element in the array has the largest priority.
The remove-max operation,
which removes the first element in the array with the largest priority,
can be implemented by using the downheap operation as a sub-routine:
Move the last node in the array to be the first node, effectively removing the element in the first index of the array. The priority of this element is at most as large as that of the removed element.
Decrease the size of the resizable array by one.
Apply the
downheapoperation to the first node so that the max-heap property is restored.
Example: Applying the remove-max operation
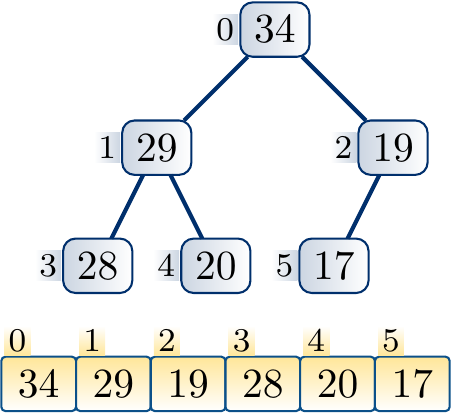
The max-heap in the beginning:
Remove the first element by moving the last element in its place. The size of the array is reduced by one. The max-heap propery is now violated.
Apply
downheap.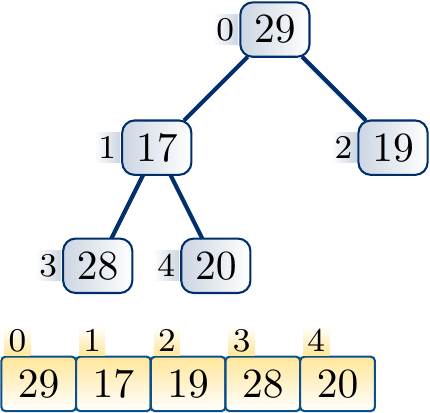
Apply
downheap. The max-heap property holds again.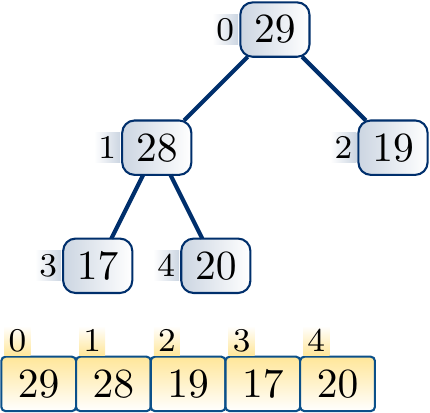
Implementations in some libraries
In Scala, the PriorityQueue class uses max-heaps.
Inserting elements and removing one with the largest priority in \(\Oh{\Lg{n}}\) time.
Searching and removing an arbitrary element as well as many other methods in \(\Oh{n}\) time.
WARNING: do not use the
maxmethod to get the element with the highest priority, it is a linear time operation. Use theheadmethod instead. Example: constructing and using a priority queue of (string,integer) pairs with the integer field determining the priority.
scala> import collection.mutable.PriorityQueue scala> val q = PriorityQueue[(String,Int)]()(_._2 compare _._2) q: scala.collection.mutable.PriorityQueue[(String, Int)] = PriorityQueue() scala> for((s,i) <- List("x","z","a","e","k") zip List(1,2,3,4,5)) q.enqueue((s,i)) scala> q res1: ....PriorityQueue[(String, Int)] = PriorityQueue((k,5), (e,4), (z,2), (x,1), (a,3)) scala> while(q.nonEmpty) { println(q.head); q.dequeue } (k,5) (e,4) (a,3) (z,2) (x,1)
Example: constructing and using a priority queue of (string,integer) pairs with the string field determining the priority. Observe that flipping the value of the comparison operator in the ordering argument of the priority queue constructor makes the queue to return the elements with the “smallest” strings first.
scala> import collection.mutable.PriorityQueue scala> val q = PriorityQueue[(String,Int)]()((e1,e2) => -(e1._1 compare e2._1)) q: scala.collection.mutable.PriorityQueue[(String, Int)] = PriorityQueue() scala> for((s,i) <- List("x","z","a","e","k") zip List(1,2,3,4,5)) q.enqueue((s,i)) scala> q res1: ....PriorityQueue[(String, Int)] = PriorityQueue((a,3), (e,4), (x,1), (z,2), (k,5)) scala> while(q.nonEmpty) { println(q.head); q.dequeue } (a,3) (e,4) (k,5) (x,1) (z,2)
In Java, the class java.util.PriorityQueue implements min-heaps.
Inserting elements and removing one with the smallest priority in \(\Oh{\Lg{n}}\) time.
Searching and removing an arbitrary element in \(\Oh{n}\) time.
In the C++ standard library, the priority_queue class uses max-heaps.
Inserting elements and removing one with the largest priority in \(\Oh{\Lg{n}}\) time.
No methods for searching arbitrary elements etc.
Python provides the heapq algorithm.
Interestingly, none of the above implement the increase-priority or decrease-priority operations.
Extra: Heapsort
This material is not included in the core contents of the course.
In addition to priority queues, binary heaps allow a natural idea for sorting: for the \(n\) elements to be sorted, insert them one by one in a min-heap and, after that, get and remove the minimum element of the queue \(n\) times. In this straightforward scenario, both phases (insertion and removal of all elements) can be done in \(\Oh{n \Lg n}\) time. However, we can do even better: (i) we can use the original array as a max-heap, (ii) perform the heap construction phase in linear time, and (iii) do the removal phase in the same array so that the result is a sorted array. We explain this heapsort algorithm below.
Suppose that we have a mutable array of \(n\) elements to be sorted.
Consider the array as a representation of a binary heap (recall Section Representing binary heaps).
Most likely, the binary heap is not a max-heap in the beginning
but we can modify it, in linear time, so that the max-heap property holds.
The procedure is as follows:
from the second last level to the first level of the tree,
apply downheap to all the nodes in the level.
Example: Phase 1 of the heapsort algorithm
The animation below illustrates the first phase of the heapsort algorithm: linear-time max-heap construction in the original array memory.
Let’s analyze the worst-case running time of the max-heap construction operation.
Suppose that the tree has \(k\) levels, meaning that its height is \(k-1\).
The number \(n\) of nodes in it is thus \(2^{k-1} \le n \le 2^k-1\).
The second-last level \(k-1-1\) has at most \(2^{k-1-1}\) nodes in it and each downheap operation does at most \(1\) swaps (the running time of a downheap operation is proportional to the number of swaps it makes).
Similarly, the level \(k-1-i\) for an \(i \in [1 .. k-1]\) has at most \(2^{k-1-i}\) nodes in it and each downheap operation does at most \(i\) swaps.
Thus the max-heap construction makes at most
\(\sum_{i=1}^{k-1} i 2^{k-1-i} = 2^{k-1} \sum_{i=1}^{k-1} \frac{i}{2^i}\)
swaps.
As \(\sum_{i=1}^{k} \frac{i}{2^i} < 2\) for all \(k \in \mathbb{N}\) and \(2^k = 2 \times 2^{k-1} \le 2 n\),
we have \(\sum_{i=1}^{k-1} i 2^{k-1-i} \le 2^{k-1} 2 = 2^k \le 2 n\).
Thus the running time of the max-heap construction is \(\Oh{n}\).
The phase two removes the elements from the max-heap one-by-one and inserts them in the correct place in the final sorted array, again using only the original array memory. This is done as follows. Initially all the \(n\) first elements are considered to represent a max-heap. The largest element is in the root. Then repeat the following until the heap contains only one element:
Swap the root with the last element in the array representing the heap.
After this, consider only the \(n-1\) first elements to represent a max-heap.
Under the constraint, fix the max-heap property by applying
downheapto the root.
Example: Phase 2 of the heapsort algorithm
The animation below shows the second phase of the heapsort algorithm: removing the maximum elements one-by.one and fixing the max-heap property in between. The same array memory is used to store the final sorted array.
Properties of heapsort:
Guaranteed worst-case running time is \(\Oh{n \Lg n}\).
Best-case running-time is \(\Oh{n}\): on arrays in which all the elements are the same, the downheap operations do not perform any swaps and the second phase of the algorithm also works in linear time.
Requires a constant amount of extra memory: only indices and two elements outside the array, no recursive function calls required.
Good for embedded systems with a limited amount of memory?
Experimental evaluation
The Scala code below gives an implementation of heapsort for arrays of integers, generalization to arbitrary comparable types is straightforward.
def heapsort(a: Array[Int]): Unit =
/*
* The parent index of the node at index i.
* Should not be called for the root node 0.
*/
inline def parent(i: Int): Int = (i-1) / 2
// The left child index of the node at the index i.
inline def leftChild(i: Int): Int = 2*i+1
// The right child index of the node at the index i.
inline def rightChild(i: Int): Int = 2*i+2
// Swap the elements at indices i and j.
def swap(i: Int, j: Int) = { val t = a(i); a(i) = a(j); a(j) = t }
// Push the node at index "start" downwards
// in the sub-heap represented by the sub-array a[0..end].
def downHeap(start: Int, end: Int): Unit =
var node = start
while leftChild(node) <= end do
var child = leftChild(node)
var dest = node
if a(dest) < a(child) then
dest = child
if child+1 <= end && a(dest) < a(child+1) then
dest = child + 1
if dest == node then return
swap(node, dest)
node = dest
end downHeap
val n = a.length
if n <= 1 then return
// Build the initial heap
var index = parent(n-1)
while index >= 0 do
downHeap(index, n-1)
index -= 1
// Move the current largest element to the correct position
// in the final result, apply downheap to the new root element.
var end = n - 1
while end > 0 do
// a(0) is the heap root, ie. the largest element in the current heap.
// Move it to the correct position a(end) in the final result.
swap(0, end)
// Decrease the heap size by one
end -= 1
// Push the new root element down the heap
downHeap(0, end)
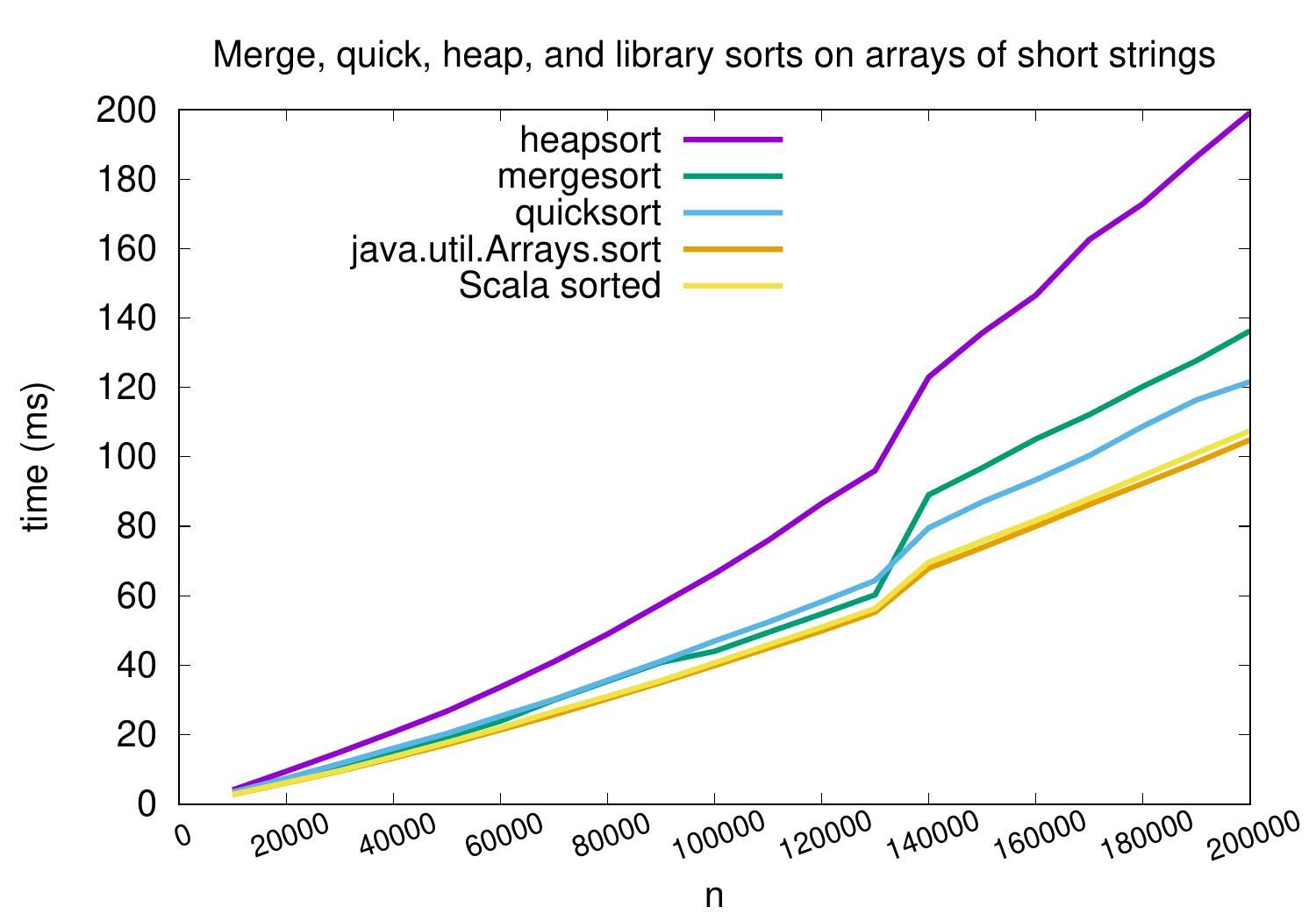
As we the next plot shows, on arrays of random integers the behavior of the heapsort implementation above is quite similar to that of Mergesort.
However, as shown in the figure below, heapsort is not that competitive on sorting arrays of strings.