Quicksort
Quicksort is another widely used sorting algorithm. Like mergesort, it is a divide and conquer algorithm. Unlike mergesort, it does not need an auxiliary array during sorting and thus needs less memory. Quicksort was published by Sir Tony Hoare already in 1961 in
C. A. R. Hoare: Algorithm 63: partition. Communications of the ACM 4(7):321, 1961.
C. A. R. Hoare: Algorithm 64: quicksort. Communications of the ACM 4(7):321, 1961.
but is still widely used nowadays. For instance,
java.util.Arrays.sort on primitive type arrays uses a variant of quicksort, and
the C++ sort uses introsort, which performs quicksort in its first phase.
The idea
In quicksort, the core idea for sorting a sub-array \(A[\LO..\HI]\), with \(\LO \le \HI\), can be described as follows:
Base case: if \(\LO = \HI\), then the sub-array \(A[\LO..\HI]\) has only one element and is thus sorted.
Divide: select a pivot element \(p\) in \(A[\LO..\HI]\), and partition the sub-array \(A[\LO..\HI]\) into three sub-arrays \(A[\LO..q-1]\), \(A[q]\) and \(A[q+1..\HI]\) such that
all the elements in \(A[\LO..q-1]\) are less than or equal to \(p\),
\(A[q] = p\), and
all the elements in \(A[q+1..\HI]\) are greater than \(p\).
After this step, the element \(p\) is at the correct index.
Conquer: recursively sort the sub-arrays \(A[\LO..q-1]\) and \(A[q+1..\HI]\) with quicksort.
The main recursive function is rather concise and elegant:
def quicksort(a: Array[Int]): Unit =
def _quicksort(lo: Int, hi: Int): Unit =
if lo < hi then
// The sub-array has at least 2 elements
// Partition
val q = partition(a, lo, hi)
// Sort the "less-than or equal" and "more than" parts
_quicksort(lo, q - 1)
_quicksort(q + 1, hi)
_quicksort(0, a.length - 1)
template <typename T>
void quicksort(std::vector<T> &array) {
using std::size_t;
std::function<void(size_t, size_t)> inner = [&](size_t lo, size_t hi) {
// This is the recursive main routine
assert(lo < hi and "the sub-array must have at least 2 elements");
// Partition
const size_t q = partition(array, lo, hi);
// Sort the "less-than or equal" and "more than" parts
// if they contain at least 2 elements
if (lo + 1 < q) inner(lo, q - 1);
if (q < hi - 1) inner(q + 1, hi);
};
if(array.size() >= 2)
inner(0, array.size() - 1);
}
Compared to the Scala version, this C++ version has more if statements. This is because the index type std::size_t is unsigned, and thus one should be careful with underflows as, for instance, \(0 - 1 > 0\) for such unsigned integer types.
Example: Sorting an array with quicksort
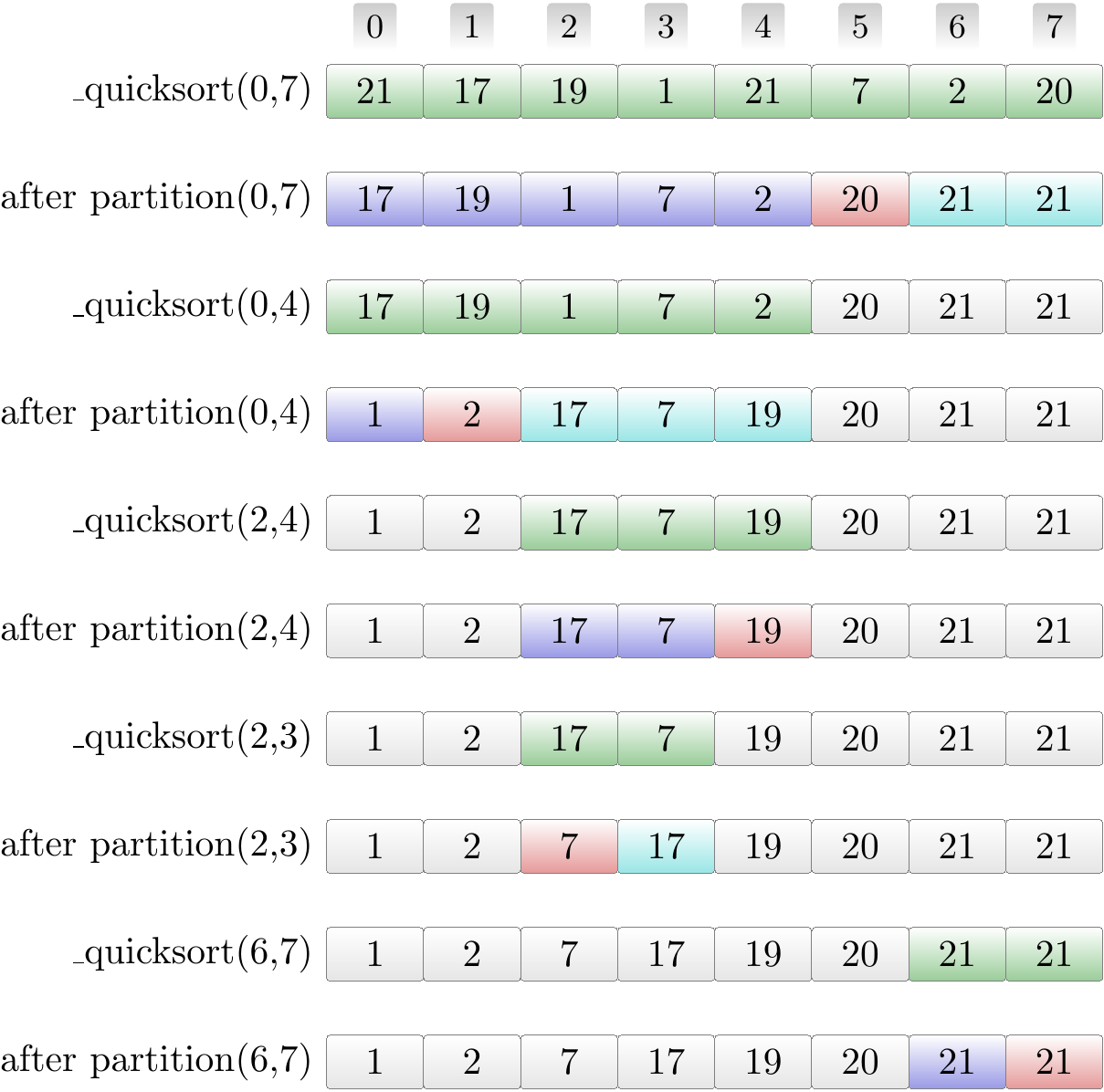
Consider the basic version shown above in Scala. The figure below shows the recursive calls and the results after partitioning in the order they are executed.
The green entries show the current sub-array \(A[\LO..\HI]\).
Red highlights the pivot element.
The blue entries form the left sub-array after partitioning.
The cyan entries form the right sub-array after partitioning.
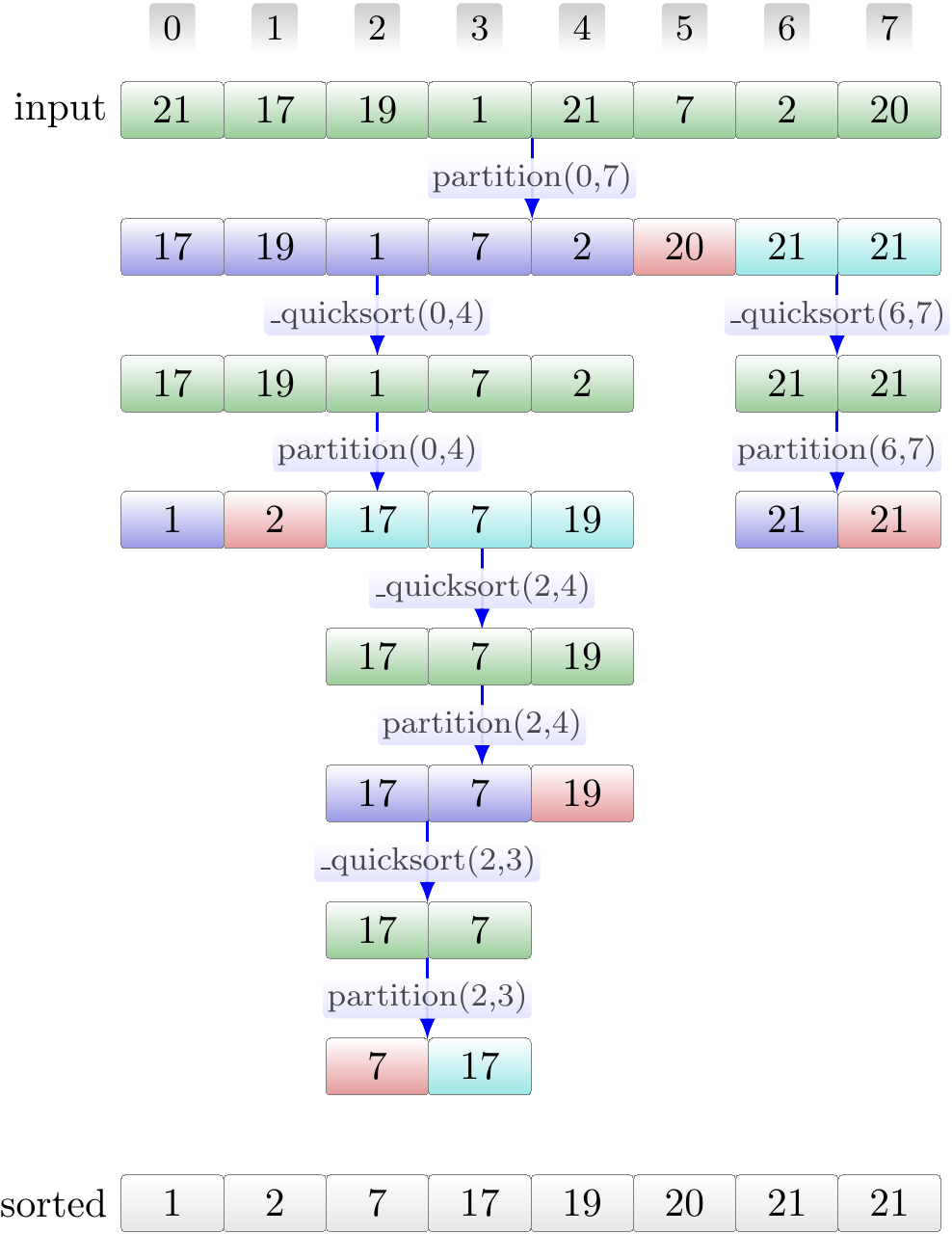
The same in a tree form, showing that, unlike in the case of Mergesort, the recursion tree is not necessarily very well balanced:
Next, we describe an algorithm for performing the partitioning. This is not the original one proposed by Hoare in 1961 but another popular one that is perhaps easier to understand. Please see Wikipedia on quicksort for the original algorithm and discussions about it.
Lomuto’s partitioning algorithm
Lomuto’s partitioning algorithm can be described verbally as follows:
Input: a sub-array \(A[\LO..\HI]\) to be partitioned.
Select a pivot element \(p\) occurring in \(A[\LO..\HI]\).
Swap the pivot element with the last element so that it is at the end of the sub-array.
Starting from \(\LO\), maintain two indices \(i\) and \(j\) such that
the elements left of \(i\) in the sub-array \(A[\LO .. i-1]\) are at most \(p\), and
the elements in the sub-array \(A[i .. j-1]\) are greater than \(p\).
Initially, \(i = \LO\) and \(j = \LO\). This implies that both \(A[\LO .. i-1]\) and \(A[i .. j-1]\) are empty in the beginning.
Repeat the following until \(j\) reaches \(\HI\):
If the element \(A[j] \le p\), swap the elements at the indices \(i\) and \(j\), and increase \(i\) by one.
Increase \(j\) by one.
Finally, swap the last element, which is the pivot, with the one at the index \(i\).
Example: Lomuto’s partitioning algorithm
Let’s apply Lomuto’s algorithm to partition a sub-array \(a[2,9]\) shown below. The pivot element has already been selected and moved to be the last element \(a[9]\). The entries will be colored as follows:
Yellow: the pivot element.
Blue: the entries from \(lo\) until \(i\). They are less or equal to the pivot.
Green: the entries from \(i\) until \(j\). The are greater than the pivot.
White: elements outside the sub-array. They are not touched by the algorithm.
Grey: the elements in the sub-array that have not yet been considered.
Click on the image to step the animation.
We can implement the Lomuto’s partition algorithm as follows:
// A helper: swap the elements at the indices i and j.
def swap(a: Array[Int], i: Int, j: Int): Unit =
val t = a(i); a(i) = a(j); a(j) = t
/* Partition the sub-array a(lo..hi).
* Return the index of the pivot element in the result. */
def partition(a: Array[Int], lo: Int, hi: Int): Int =
// Very simple pivot selection, will be improved later!
val pivot = a(hi)
// a(lo..i-1) will contain elements less or equal to the pivot
var i = lo
// a(i..j-1) will contain elements greater than the pivot
var j = lo
while j < hi do
if a(j) <= pivot then
swap(a, i, j)
i += 1
j += 1
// Move the pivot element into its correct place
swap(a, i, hi)
// Return the index of the pivot element
i
template <typename T>
std::size_t partition(std::vector<T> &array, std::size_t lo, std::size_t hi) {
assert(lo < hi and "the sub-array must have at least 2 elements");
// Very simple pivot selection, will be improved later!
const T &pivot = array[hi];
// array[lo..i-1] will contain elements less or equal to the pivot
std::size_t i = lo;
// array[i..j-1] will contain elements greater than the pivot
for(std::size_t j = lo; j < hi; j++)
if(array[j] <= pivot)
std::swap(array[i++], array[j]);
// Move the pivot element into its correct place
std::swap(array[i], array[hi]);
// Return the index of the pivot element
return i;
}
Instability
Quicksort, as presented above, is not stable because the partitioning method can change the relative order of equal elements. A simple example is shown below.
Example: Instability in Lomuto’s algorithm
The animation shows a partitioning where the relative order of the two elements “10” is changed.
Experimental evaluation
Let’s compare the practical performance of the mergesort and quicksort algorithm implementations presented in these notes. As inputs, we again use arrays of random integers.
On these implementations and inputs, quicksort is somewhat faster than mergesort.
Let’s further compare the performance of these simple implementations against some in the standard libraries.
On these random integer arrays,
our quicksort performs very similarly to java.util.Arrays.sort.
Unsurprisingly,
the implementation of java.util.Arrays.sort in this case is a variant of quicksort
(see, for instance, this source code).
Similarly, the sorted method of Scala for integer arrays
currently calls java.util.Arrays.sort.
Analysis and improvements
Based on the above experimental plots, our quicksort algorithm seems to be an \(\Oh{n \Lg{n}}\) algorithm as it scales similarly to mergesort. However, this is not the case: in the worst case, the basic version takes \(\Theta(n^2)\) time as argued below.
Partitioning takes \(\Theta(k)\) time, where \(k\) is the length of the considered sub-array.
In our basic version, we select the last element in the sub-array to be the pivot element.
The quadratic-time worst case perfomance occurs when the array is already sorted:
The pivot element does not move anywhere and we effectively just produce one partition of size \(k-1\).
Thus the recurrence is \(T(n) = \Theta(n) + T(n-1) = \Theta(n^2)\).
The Scala version presented above does not actually work at all on large already sorted arrays because the recursion depth is also large and one gets a stack overflow error.
Pivot selection
The quadratic time consumption on already sorted data is not desirable as in practise it can be quite common that the data is already almost in order. Therefore, pivot element selection is important.
Worst-case \(\Oh{n \Lg n}\) running time is obtained when the pivot is chosen so that the obtained two partitions are of roughly equal size. Thus one could choose the pivot to be the median of the subarray considered. In principle, the median can be computed in linear time, see Section 9.3 in Introduction to Algorithms (Aalto access), but the constant factors in this operation are quite large. A practical approximation is to select the pivot to be the median of three random elements in the subarray. Another common and easy-to-implement strategy is to select a random element in the subarray to be the pivot element. After the selection, the pivot is moved to be the last element and we then proceed as earlier in the partition algorithm. For arrays with \(n\) distinct elements, the expected running time of quicksort is \(\Oh{n \Lg{n}}\) when random pivots are chosen, see Section 7.4 in Introduction to Algorithms (Aalto access). This is what happened in our experiments above: we did not choose random pivots but the elements were random and thus the situation was effectively the same.
Multiple equal elements
Pivot selection does not help when the array has a lot of equal elements. Consider the case that the array consists of \(n\) elements that are all the same. No matter how the pivot is selected, the partitioning of a subarray with \(k\) elements again effectively produces just one partition with \(k-1\) elements that are the same as the pivot element. Thus the running time of the basic quicksort algorithm is again \(\Theta(n^2)\). This problem can be solved by using a partitioning function that produces three partitions:
one with elements smaller than the pivot element,
one with elements equalt to the pivot element (including the pivot element itself), and
one with elements larger than the pivot.
The partition with equal elements needs not to be further processed as it is already sorted. The implementation of this three-way partitioning algorithm is left as a programming exercise.